Non-maximum suppression:非极大值抑制算法,本质是搜索局部极大值,抑制非极大值元素
[nms]:standard nms,当目标比较密集、存在遮挡时,漏检率高
[soft nms]:改变nms的hard threshold,用较低的分数替代0,提升recall
[softer nms]:引入box position confidence,通过后处理提高定位精度
[DIoU nms]:采用DIoU的计算方式替换IoU,因为DIoU的计算考虑到了两框中心点位置的信息,效果更优
[fast nms]:YOLOACT引入矩阵三角化,会比Traditional NMS抑制更多的框,性能略微下降
[cluster nms]:CIoU提出,弥补Fast NMS的性能下降,运算效率比Fast NMS下降了一些
[mask nms]:mask iou计算有不可忽略的延迟,因此比box nms更耗时
[matrix nms]:SOLO将mask IoU并行化,比FAST-NMS还快,思路和FAST-NMS一样从上三角IoU矩阵出发,可能造成过多抑制。
[WBF]:加权框融合,Kaggle胸片异物比赛claim有用,速度慢,大概比标准NMS慢3倍,WBF实验中是在已经完成NMS的模型上进行的
- nms
- 过滤+迭代+遍历+消除
- 首先过滤掉大量置信度较低的框,大于confidence thresh的box保留
- 将所有框的得分排序,选中最高分的框
- 遍历其余的框,如果和当前最高分框的IOU大于一定阈值(nms thresh),就将框删除(score=0)
- 从未处理的框中继续选一个得分最高的,重复上述过程
- when evaluation
- iou thresh:留下的box里面,与gt box的iou大于iou thresh的box作为正例,用于计算出AP和mAP,通过调整confidence thresh可以画出PR曲线
- 过滤+迭代+遍历+消除
softnms
基本流程还是nms的贪婪思路,过滤+迭代+遍历+衰减
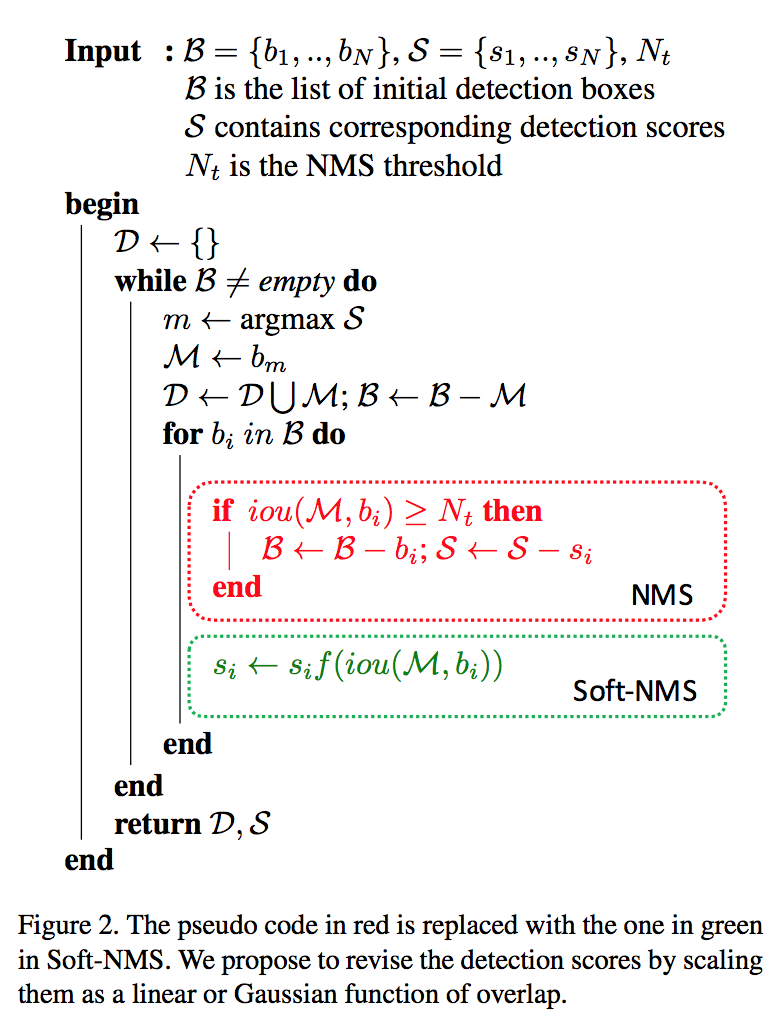
re-score function:high overlap decays more
- linear:
- for each $iou(M,b_i)>th$, $s_i=s_i(1-iou)$
- not continuous,sudden penalty
- gaussian:
- for all remaining detection boxes,$s_i=s_i e^{-\frac{iou(M,b_i)}{\sigma}}$
- linear:
算法流程上未做优化,是针对精度的优化
softer nms
- 跟soft nms没关系
- 具有高分类置信度的边框其位置并不是最精准的
- 新增加了一个定位置信度的预测,使其服从高斯分布
- infer阶段边框的标准差可以被看做边框的位置置信度,与分类置信度做加权平均,作为total score
- 算法流程上未做优化,完全是精度的优化
DIoU nms
也是为了解决hard nms在密集场景中漏检率高的问题
但是不同于soft nms的是,D的改进在iou计算上,而不是在score
diou的计算:$diou = iou-\frac{\rho^2(b_1, b_2)}{c^2}$
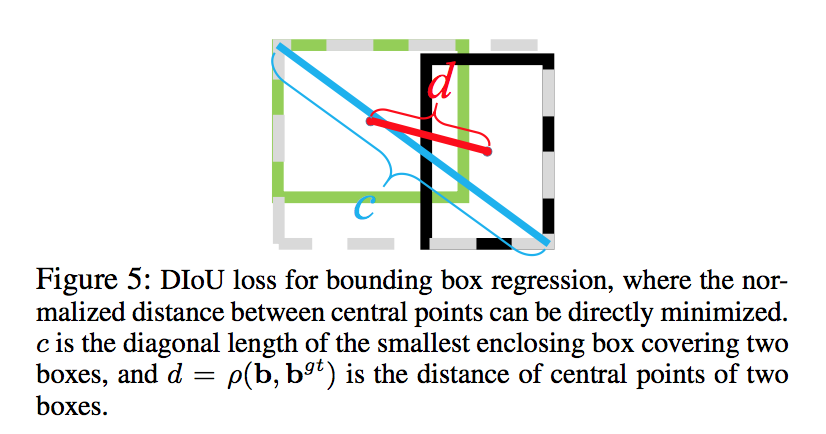
算法流程上未做优化,仍旧是精度的优化
fast nms
yoloact提出
主要效率提升在于用矩阵操作替换遍历,所有框同时被filter掉,而非依次遍历删除
iou上三角矩阵
- iou上三角矩阵的每一个元素都是行号小于列号
- iou上三角矩阵的每一个行,对应一个bnd box,与其他所有score小于它的bnd box的iou
- iou上三角矩阵的每一个列,对应一个bnd box,与其他所有score大于它的bnd box的iou
- fast nms在iou矩阵每一列上求最大值,如果这个最大值大于iou thresh,说明当前列对应的bnd box,存在一个score大于它,且和它重叠度较高的bnd box,因此要把这个box过滤掉
有精度损失
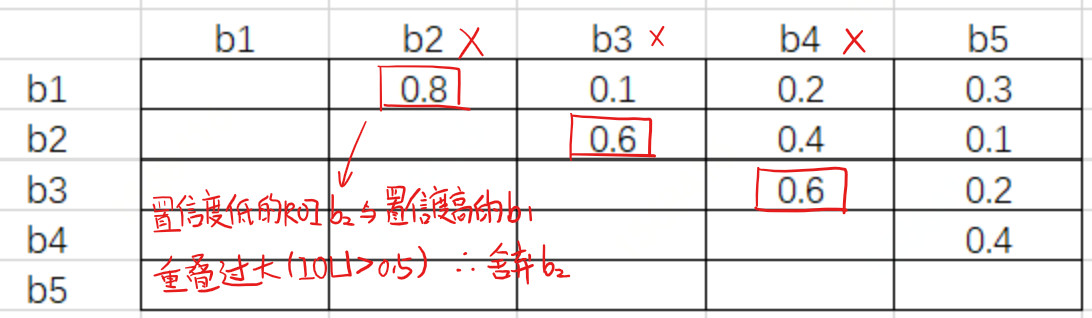
场景:
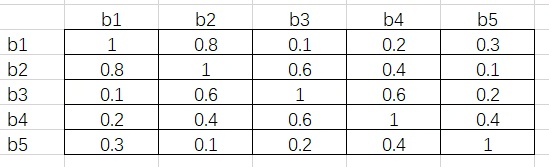
如果是hard nms的话,首先遍历b1的其他box,b2就被删除了,这是b3就不存在高重叠框了,b3就会被留下,但是在fast nms场景下,所有框被同时删除,因此b2、b3都没了。
cluster nms
针对fast nms性能下降的弥补
fast nms性能下降,主要问题在于过度抑制,并行操作无法及时消除high score框抹掉对后续low score框判断的影响
算法流程上,将fast nms的一次阈值操作,转换成少数几次的迭代操作,每次都是一个fast nms
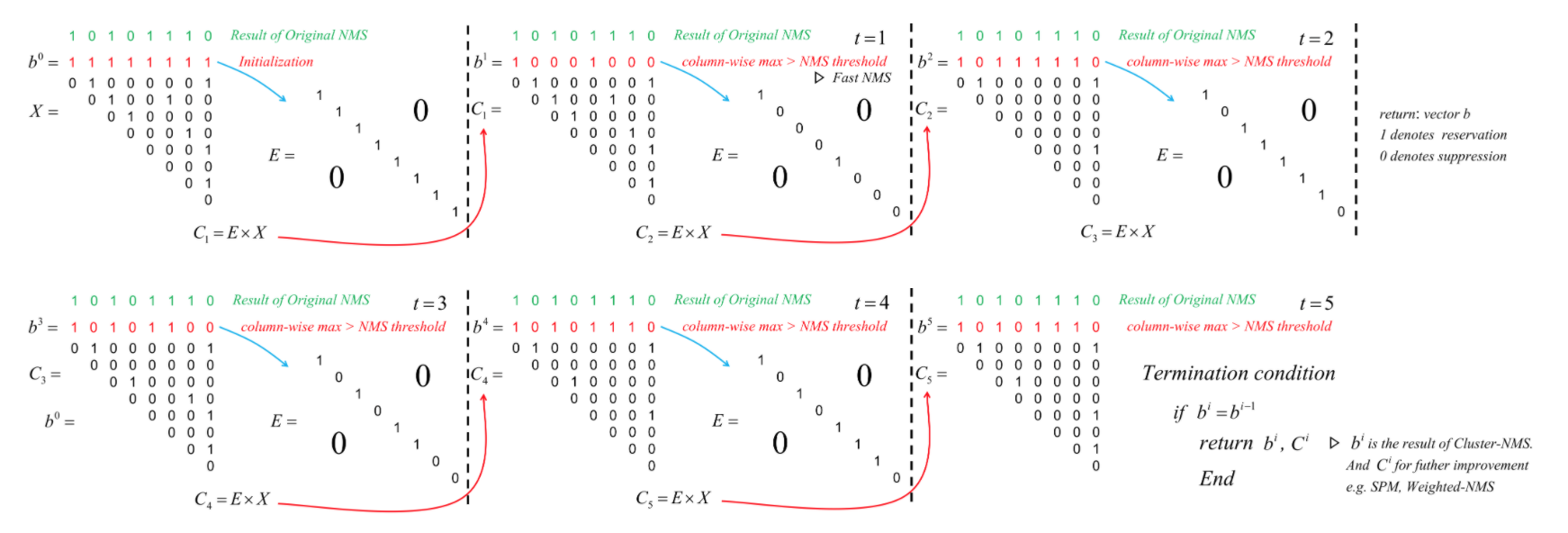
- 图中X表示iou矩阵,b表示nms阈值二值化以后的向量,也就是fast nms里面那个保留/抑制向量
- 每次迭代,算法将b展开成一个对角矩阵,然后左乘iou矩阵
- 直到出现某两次迭代后, b保持不变了,那么这就是最终的b
cluster nms的迭代操作,其实就是在省略上一次Fast NMS迭代中被抑制的框对其他框的影响
数学归纳法证明,cluster nms的结果与hard nms完全一致,运算效率比fast nms下降了一些,但是比hard nms快得多
cluster nms的运算效率不与cluster数量有关,只与需要迭代次数最多的那一个cluster有关
mask nms
- 从检测框形状的角度拓展出来,包括但不限于mask nms、polygon nms以及inclined nms
- iou的计算方式有一种是mmi:$mmi=max(\frac{I}{I_A}, \frac{I}{I_B})$
matrix nms
学习soft nms:decay factor
one step further:迭代改并行
对于某个object $m_j$的score进行penalty的时候考虑两部分影响
- 迭代某个$m_i$时,对后续lower score的$m_j$的影响
- 一是正面影响$f(iou_{i,j})\ linear/guassian$:这个框保留,那么后续框都要基于与其的iou做decay
- 二是反向影响$f(iou_{*,i})=max_{\forall s_k>s_i}f(iou_{k,i})$:如果这个框不保留,那么对于后续框来讲,应该消除这个框对其的decay,选最大值的意义是当前mask被抑制最有可能就是和他重叠度最大的那个mask干的(因为对应的正面影响1-iou最小)
final decay factor:$decay_j=min_{\forall s_i > s_j}\frac{f(iou_{i,j})}{f(iou_{*,i})}$
算法流程
<img src="nms/matrixnms.png" width="50%;" />
* 按照原论文的实现,decay永远大于等于1,因为每一列的iou_cmax永远大于等于iou,从论文的思路来看,每个mask的decay是它之前所有mask的影响叠加在一起,所以应该是乘积而不是min:
1
2
3
4
5
6
7
8
9
10
11
12
# 原论文实现
if method=='gaussian':
decay = np.exp(-(np.square(iou)-np.square(iou_cmax))/sigma)
else:
decay = (1-iou)/(1-iou_cmax)
decay = np.min(decay, axis=0)
# 改进实现
if method=='gaussian':
decay = np.exp(-(np.sum(np.square(iou),axis=0)-np.square(iou_cmax))/sigma)
else:
decay = np.prod(1-iou)/(1-iou_cmax)