Group Normalization
动机
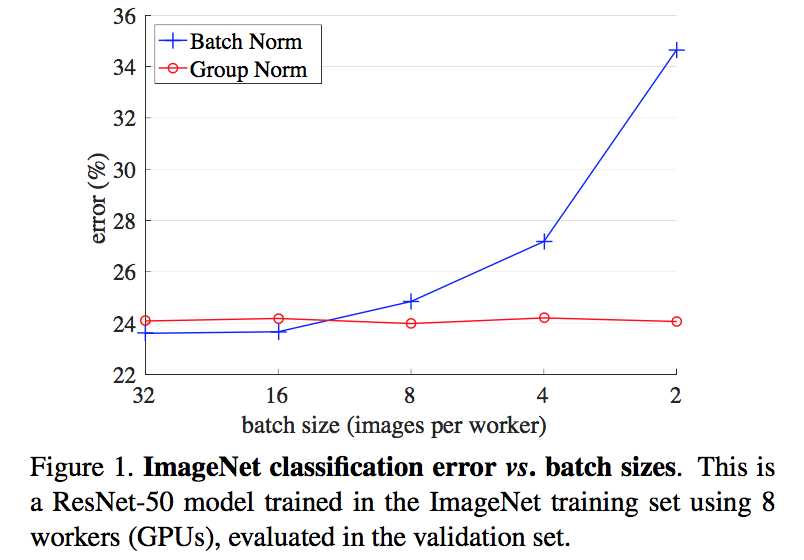
- for small batch size
- do normalization in channel groups
- batch-independent
- behaves stably over different batch sizes
- approach BN’s accuracy
论点
- BN
- requires sufficiently large batch size (e.g. 32)
- Mask R-CNN frameworks use a batch size of 1 or 2 images because of higher resolution, where BN is “frozen” by transforming to a linear layer
- synchronized BN 、BR
- LN & IN
- effective for training sequential models or generative models
- but have limited success in visual recognition
- GN能转换成LN/IN
- WN
- normalize the filter weights, instead of operating on features
- BN
方法
group
- it is not necessary to think of deep neural network features as unstructured vectors
- 第一层卷积核通常存在一组对称的filter,这样就能捕获到相似特征
- 这些特征对应的channel can be normalized together
- it is not necessary to think of deep neural network features as unstructured vectors
normalization
transform the feature x:$\hat x_i = \frac{1}{\sigma}(x_i-\mu_i)$
the mean and the standard deviation:
the set $S_i$
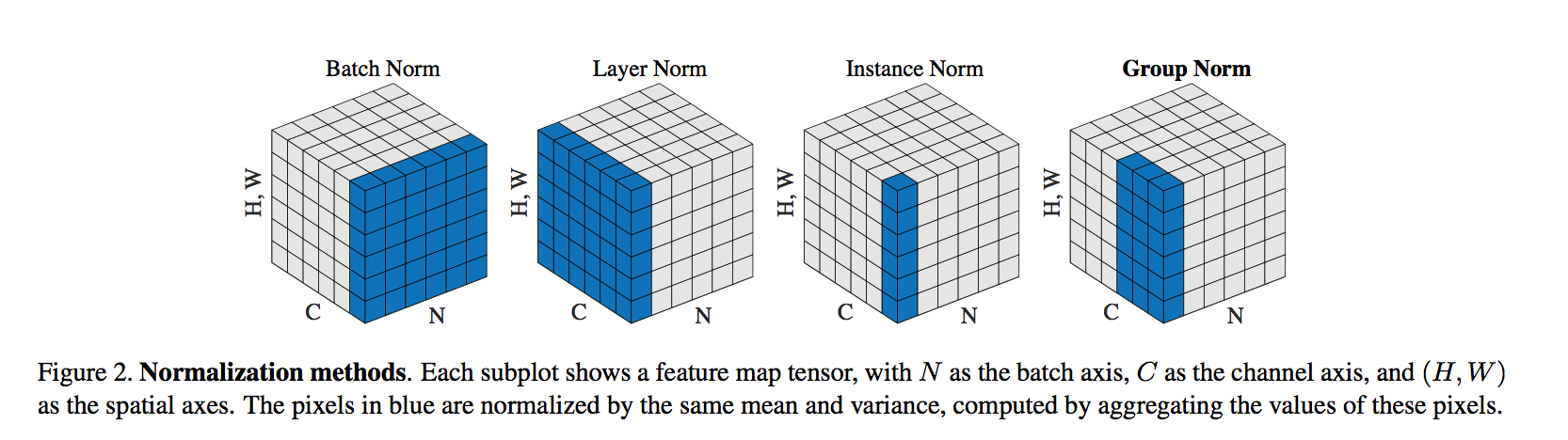
- BN:
- $S_i=\{k|k_C = i_C\}$
- pixels sharing the same channel index are normalized together
- for each channel, BN computes μ and σ along the (N, H, W) axes
- LN
- $S_i=\{k|k_N = i_N\}$
- pixels sharing the same batch index (per sample) are normalized together
- LN computes μ and σ along the (C,H,W) axes for each sample
- IN
- $S_i=\{k|k_N = i_N, k_C=i_C\}$
- pixels sharing the same batch index and the same channel index are normalized together
- LN computes μ and σ along the (H,W) axes for each sample
- GN
- $S_i=\{k|k_N = i_N, [\frac{k_C}{C/G}]=[\frac{i_C}{C/G}]\}$
- computes μ and σ along the (H, W ) axes and along a group of C/G channels
- BN:
linear transform
- to keep representational ability
- per channel
- scale and shift:$y_i = \gamma \hat x_i + \beta$
relation
- to LN
- LN assumes all channels in a layer make “similar contributions”
- which is less valid with the presence of convolutions
- GN improved representational power over LN
- to IN
- IN can only rely on the spatial dimension for computing the mean and variance
- it misses the opportunity of exploiting the channel dependence
- 【QUESTION】BN也没考虑通道间的联系啊,但是计算mean和variance时跨了sample
- to LN
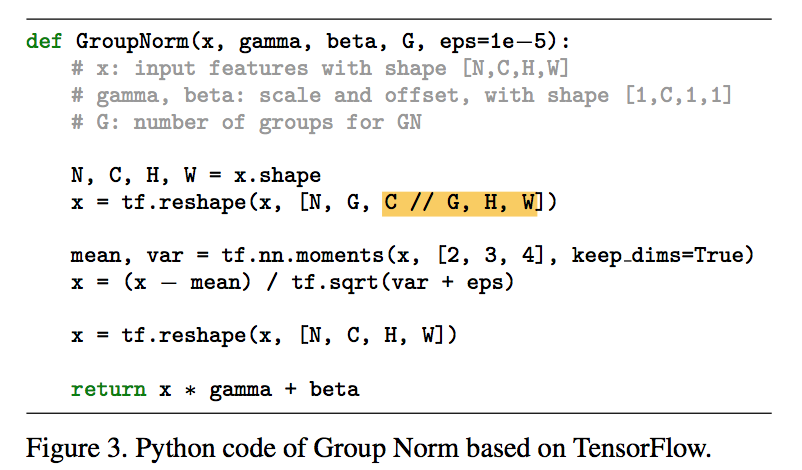
implementation
- reshape
- learnable $\gamma \& \beta$
- computable mean & var
实验
- GN相比于BN,training error更低,但是val error略高于BN
- GN is effective for easing optimization
- loses some regularization ability
- it is possible that GN combined with a suitable regularizer will improve results
- 选取不同的group数,所有的group>1均好于group=1(LN)
- 选取不同的channel数(C/G),所有的channel>1均好于channel=1(IN)
- Object Detection
- frozen:因为higher resolution,batch size通常设置为2/GPU,这时的BN frozen成一个线性层$y=\gamma(x-\mu)/\sigma+beta$,其中的$\mu$和$sigma$是load了pre-trained model中保存的值,并且frozen掉,不再更新
- denote as BN*
- replace BN* with GN during fine-tuning
- use a weight decay of 0 for the γ and β parameters
- GN相比于BN,training error更低,但是val error略高于BN