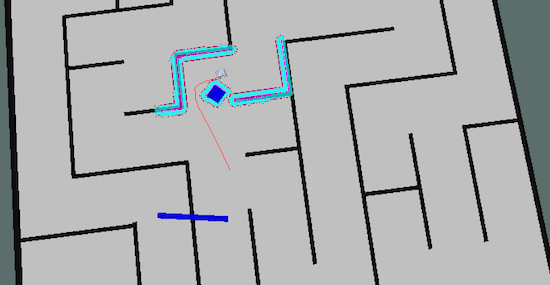
今天发现了一个支持二次开发的开源方案,说白了就是把karto、acml、navigation stack等几个ROS开源包整合的比较漂亮,代码结构值得借鉴。
执行keyboard_control之前要先执行脚本,添加键盘。
老AS包里面没有keyboard control,可以执行teleop_twist_keyboard包。autolabor_fake是虚拟小车的driver,建模了电机、odom相关信息,订阅cmd_vel信息。控制真实小车时这个节点要替换。
base是对机器人底盘的仿真,launch文件的默认Fixed Frame是base_link,想要控制小车运动可以将Frame切成real_map或odom。
todolist:
命令行里面控制量的显示不太好看,可以尝试在源文件里面优化,添加交互提示。
stage是对场景的仿真,场景由map_server读取,launch以后就能查看当前场景地图。
rostopic里面有一个initialpose信息,由rviz发布。rostopic list里面好多topic都是rviz发布的,在displays栏目里面取消勾选就不会发布了。
object是对障碍物的仿真,调用stage,添加interactivemarker,然后选择Interact工具,理论上地图上应该出现障碍物,但是我没找到。。。状态显示waiting for tf info。
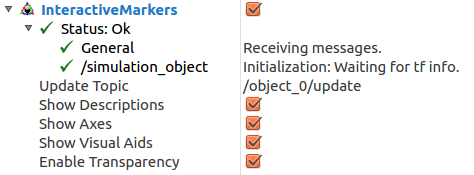
修正:添加的marker要在topic里面选择,不要在type栏下。然后地图上放好障碍物以后要右键apply。
lidar是对雷达点云的仿真,launch中给了一个lidar和map的静态tf,实际使用中应该给lidar和base_link的。
todolist:
map和real_map给的有点混乱,明天会统一一下。
老AS包create_map仿真过程中,由于场景提供mapserver和slam算法同时publish了/map这个topic,要进行区分,在launch文件里面对其中一个进行remap:
1
2
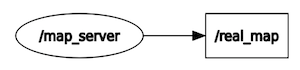
3<node pkg="map_server" type="map_server" name="map_server" args="$(find simulation_launch)/map/MG_map.yaml">
<remap from="/map" to="real_map" />
</node>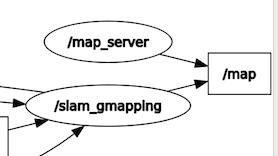
这时rostopic里面就会出现real_map这个话题,两个地图能够同时显示。
代码解析
首先是simulation包:
autolabor_description没啥好说的,urdf文件里面定义了一个robot,整个机器人被渲染成了一个base_link,没有子节点,懒。
autolabor_fake包是底盘驱动,提供了一个
autolabor_fake_node节点,其订阅类型为geometry_msgs/Twist的话题cmd_vel,信息来源可以是joystick/keyboard(tele_op_xxx)/cmd line(rostopic pub xxx)。其发布类型为nav_msgs/Odometry的话题odom。同时该节点还会将odom frame到base_link frame的transform信息提供给tf node,用来tf_broadcast。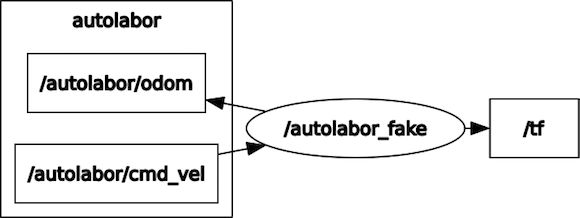
lidar_simulation包自身提供了两个节点
lidar_simulation和obstacle_simulation。3.1
LidarSimulation::getPose这个函数中有一段代码开始比较困惑:1
2
3
4
5
6
7// ROS_INFO("roll and pitch and yaw and esp :%lf %lf %lf %lf", roll, pitch, yaw, esp); //esp=0.000001,r&p=0.000000
if (pow(roll,2) + pow(pitch,2) > esp){
start_angle = yaw + max_angle_;
reverse = -1.0;
}else{ // default situation:
start_angle = yaw + min_angle_;
reverse = 1.0;通常情况下,我们都使用右手坐标系,二维平面下,global_frame_到lidar_frame_的坐标变换transform欧拉角形式下的r和p角应该始终是$0.0$,yaw代表了激光雷达$x$轴的变换,加上
min_angle_就切换成了激光光束的初始发射角度start_angle。如果坐标系定义反了,r&p就应该有值,这时因为坐标轴定义反过来了,激光光束的初始发射角度就变成了从正方向上的max_angle_开始的。3.2
LidarSimulation::updateMap这个函数值得注意,这是一个service client,用来调用地图更新,在当前功能包的默认launch文件中,只加载了一次地图,没有体现出它的作用。当执行建图任务时,因为map frame和odom frame会不断进行矫正,建图包就会call这个request来实时更新地图。
3.3 该功能包下还自定义了一个obstacle service,提供
obstacle_simulation节点来更新障碍物信息。这里的障碍物是指手动添加的障碍物(interactiveMarker),launch文件中可以定义其形状顶点。 其中的
ObstacleSimulation::pnpoly函数用来判断某点是否落在多边形内,之前刷算法时有考虑过这个问题,这里给出的解法不知道是不是最优的,just for record:1
2
3
4
5
6
7
8
9
10
11bool ObstacleSimulation::pnpoly(geometry_msgs::Polygon& footprint, float& x, float& y){
int i,j;
bool c = false;
for (i=0, j=footprint.points.size()-1; i<footprint.points.size(); j = i++){
if ( ( (footprint.points.at(i).y > y) != (footprint.points.at(j).y > y) ) &&
(x < (footprint.points.at(j).x-footprint.points.at(i).x) * (y-footprint.points.at(i).y) / (footprint.points.at(j).y - footprint.points.at(i).y) + footprint.points.at(i).x) ){
c = !c;
}
}
return c;
}这里面的for,循环条件遍历的是多边形的每一条边,如$(3,0), (0,1), (1,2), (2, 3)$这样。判定的是给定点是否落在给定边的内侧,这里所谓的内侧是以给定边的起始节点为原点,给定线段的顺时针方向。
3.4 obstacle的具体操作定义在static_map中,这里面出现了世界坐标系World,值得注意的是,栅格地图的原点在地图的一角,栅格的位置用整型来表示,而世界坐标系中栅格的位置由其中心来表示,两者相差$0.5$个resolution。lidar_simulation里面创建了一个static_map对象
map_,以及回调函数LidarSimulation::obstacleHandleServer。3.5 lidar_simulation功能包中的这两个节点:
lidar_simulation是map级的,obstacle_simulation是obstacle级的。
接下来看simulation_launch包:
这个包里面没有源代码,只提供了几个launch文件,用来仿真几种不同的情况:
sim_move_simulation.launch就是简单的底盘控制,控制小车在给定地图上运动,同时可视化雷达点云信息。create_map_simulation.launch用来建图,在底盘控制的基础上,启动了建图功能包。发布默认名字为/map的topic,命令行执行map_saver保存。move_base_simulation.launch用来导航,在底盘控制的基础上,启动了导航套件acml&move_base,这时小车的底盘控制节点autolabor_fake_node订阅的cmd_vel信息不再来自teleop_keyboard,而是来自move_base的规划结果。
最后是move_base_sim这个功能包:
是用作真实底盘控制的(目测就是对ROS开源的move_base包的二次封装,貌似删了一些不用的插件),先skip,接下来我会直接解析ROS导航套件。